
Robo-Sumo Competition Rules
As in the Japanese sport of Sumo wrestling, the goal of Robo-Sumo is to force your opponent out of the ring.
What is Robo-Sumo?
Robo-Sumo is designed to be a fun competition for mid highschool through early college level students. The purpose of Robo-Sumo competitions is to help engage students to learn about electronics and programming, while the competitive aspects of Robo-Sumo provide additional motivation for students to rapidly improve their skills in design thinking, software, and hardware engineering.
Robo-Sumo robots are totally autonomous, with student written programs controlling every aspect of the robot’s operation. The robots are not remotely-controlled in any way. Two robots at a time are placed onto a specially-designed ring and must use their sensors and programming to find their opponent and push them out of the ring. The success of any particular Robo-Sumo robot can be dependent on a combination of factors, including the robot’s physical design and layout, its control software, and the type of sensors used, making Robo-Sumo an ideal open-ended project suitable for either individual students, or small groups of students.
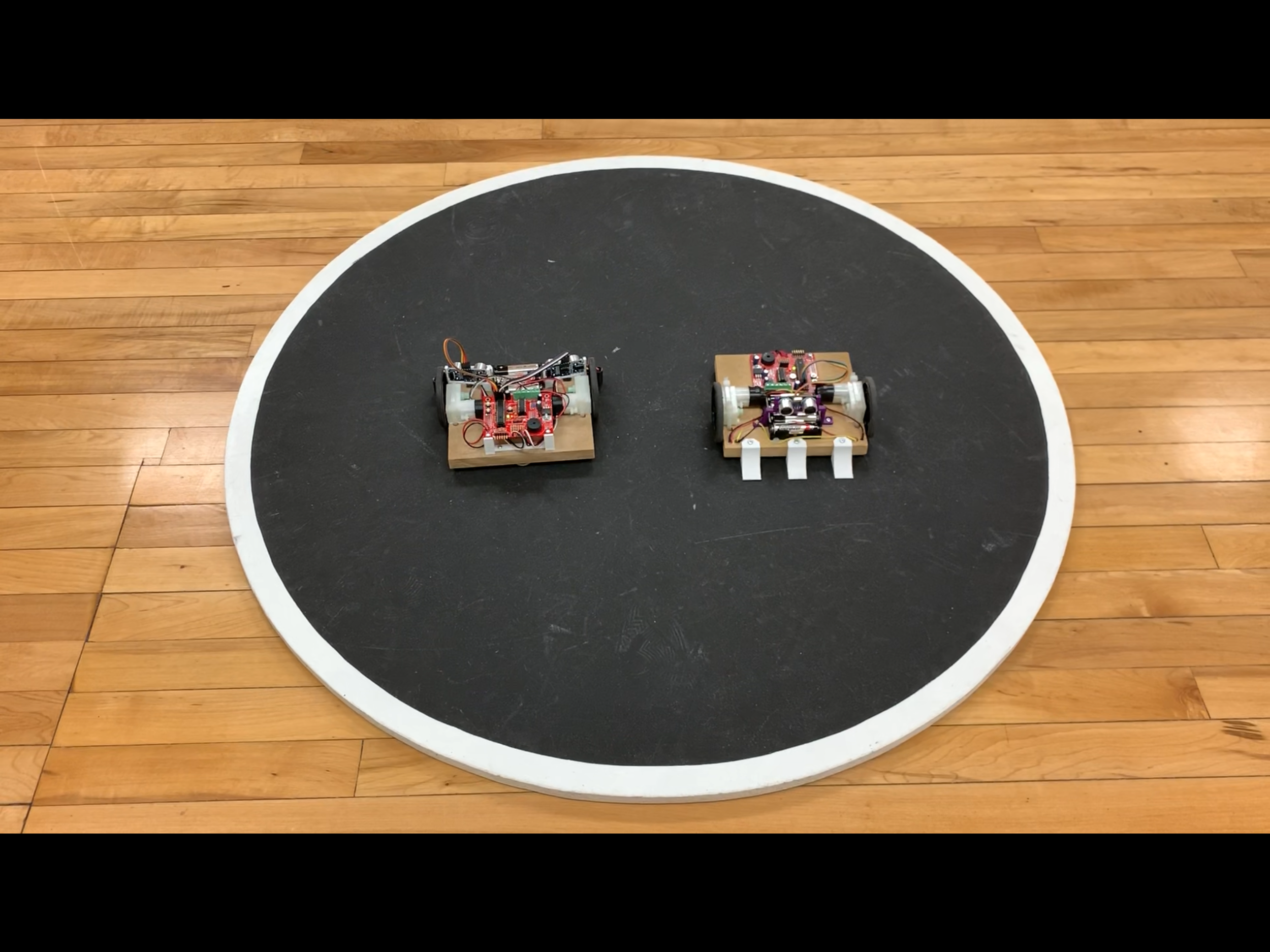
Two robots engaged in a Robo-Sumo competition demonstrating the start of a bout, sensing of their opponents, and the winning robot staying in the ring at the end of the bout.
Robo-Sumo is based on the Robogames Unified Sumo Robot Rules with slight modifications to better support beginner-level and smaller-scale competitions. For example, the suggested Robo-Sumo robot size follows the dimensions of the Robogames Mega Sumo size class as this physical size allows students to build simpler, single-layer Sumo robots. But, both the weight of the Robo-Sumo robot has been lowered, and the diameter of the competition ring has been reduced from the Mega Sumo specifications, in order to better fit the capabilities of inexpensive gear motors that are commonly used in our classroom competitions.
We have had a great deal of success with this particular formula and format at the high school level. We have strived to create Robo-Sumo competition rules which are simultaneously beginner-friendly and allow more advanced students the freedom to innovate in both their hardware and software design. Our most important goals were to design a competition that would maximize the ability of all participants to build and field a successful Sumo robot using simple, inexpensive, and readily available components. We hope our Robo-Sumo rules, outlined below and also freely available for download and modification, will be useful for you in creating your own Sumo robot competition, and we encourage you to freely modify them based on your own particular parameters and goals. Have fun building and competing with Robo-Sumo!
Robo-Sumo match overview
Robo-Sumo matches consist of three bouts between two fully-autonomous Sumo robots set on a circular wrestling platform, or ring. In the first bout, the robots are placed side-by-side in the centre of the ring, about one robot-width apart, and facing in opposite directions. In the second bout, the starting positions of the robots are reversed – this way, your robot and your opposing robot will have been located both to the left and to the right of each other, helping to counteract any effects of sensor or software directional preference. In the third bout, the robots are placed back-to-back in the centre of the ring to start.

Robo-Sumo robot starting positions for each bout.
The referee starts each bout with a verbal count and starting signal. After the starting signal is given, the robot handlers activate their sumo robots (typically with a button press). After activation, robots must wait for 5 seconds, without moving, to allow the robot handlers and observers to clear the sensor range of the robots (ideally, maintaining a one ring-width keep-out area outside of the wrestling ring will prevent robot sensors from getting confused by targets outside of the ring). After the 5 second delay ends, each robot must actively try to search for its opponent and attempt to push them out of the ring.
Each bout ends when one of the two Sumo robots loses by being pushed out of the ring or exiting the ring in such a way that it cannot drive back into the ring on its own, or after the expiration of a match timer if neither robot leaves the ring. To win, a robot must remain fully functional in the ring until the bout is ended by the referee. The Sumo robot that wins the majority of the three bouts wins the current Sumo match and goes on to face a new competitor in another three-bout match.
Robo-Sumo components
Robo-Sumo is designed to be accessible to all learners, so simple and inexpensive components are preferred over technological sophistication. Some suggested components and materials are listed below:
Robot chassis/base - MDF (medium density fibreboard) is inexpensive, dimensionally stable, heavy, and easy to cut and drill, making it a great material for the sumo robot chassis or base. But, feel free to experiment with other materials as well.
DC gear motors - low voltage (6V) gear motors make great drive motors as they are available from a variety of suppliers and are simpler to control through software than stepper or servo motors. Use two gear motors driving rubber wheels (for better grip) as well as a plastic chair glide to simplify robot construction and steering.
Phototransistor floor sensors - a reflective sensor made by pairing an IR (infrared) LED with an IR phototransistor can produce a large change in output voltage based on the reflectivity of surfaces. The white line at the edge of the sumo ring reflects light much better than the black ring surface making this an inexpensive and effective floor sensor.
IR demodulator robot sensors - an IR LED paired with an IR demodulator can be used to detect the opponent robot at close ranges. The demodulator provides an on/off signal when it detects pulses from the LED, and operates best at short ranges.
Ultrasonic distance sensors - an ultrasonic/sonar sensor can be used to determine the exact distance to the opposing robot, providing your robot with better decision-making capabilities than when using an IR sensor.
Robo-Sumo robot
In order to help students develop and refine their software and interfacing skills, Robo-Sumo is designed to be a test of sensor and software effectiveness instead of brute force. The way Robo-Sumo has been designed to achieve this goal – and to prevent a competitive escalation in robot power and weight – is to require all robots to use the same drive motors and battery systems. Using identical drive systems helps to ensure that a winning robot design is based primarily on robot engineering design and control program capability, and is less dependent on stronger, faster, or costlier drive systems and heavy batteries. Volume purchasing of identical robot drive systems also helps reduce costs making Robo-Sumo competitions easier to support in a classroom or maker space.
Robot physical characteristics
the entire sumo robot and all of its components must fit within a 20 cm X 20 cm X 20 cm (8” X 8” X 8”) cubic space at the start of each bout, and have a weight of less than 1.5 kg (3.3 lb)
during a bout, a sumo robot may unfold or expand one or more parts of itself to become larger than 20 cm in any or all direction(s)
robots may not drop or eject any parts of themselves or any other materials onto or out of the ring – any part separated from the robot will be treated as a mechanical failure, forfeiting that bout to their opponent
robots may not mark, adhere to, or damage the ring in any way – only wheels, skids, or contact sensors are allowed to be in contact with the ring
robots may not damage their opponent deliberately in any way – robots designed to deliberately damage their opponents will be disqualified from the competition (accidental damage from an opponent’s robot pushing on parts of your robot should be anticipated and planned for)
parts of robots designed to cause damage to an opposing robot will be required to be removed, or the robot may be disqualified from competition
robots are allowed to emit signals for the purpose of locating and identifying their opponents, and for detecting the edge of the wrestling ring, but are not allowed to continuously emit ‘jamming’ signals designed to overwhelm their opponent’s sensors
Propulsion and mechanisms
all robots must use two identical gear motors, wheels, and a common battery pack (or battery voltage, at the discretion of the organizers) for their motive propulsion
additional motors of any type (e.g. DC, servo, stepper, etc.) are allowed on the robot for functions other than propulsion (e.g. rotating sonar sensor, fork-lift arms, shovel scoops, etc.)
additional battery systems are allowed for powering circuits other than those driving the propulsion motors
Sensors
robots must be able to sense the boundary of the ring using optical or contact floor sensors, and must demonstrate avoidance of the ring edge during qualification
robots must be able to remotely sense their opponent using non-contact sonar or optical sensors, and must demonstrate object detection during qualification
additional sensors for sound, contact, proximity, optical, vision, or other inputs related to robot sensing functions are allowed
a switch or remote control sensor can be used to activate the robot at the start of the bout, but must not provide any other control input during the bout
during a bout robots must be fully autonomous – sensors for the purpose of receiving remote control guidance or assistance of any kind are not permitted
Robo-Sumo ring
The Sumo wrestling ring can be constructed out of any materials and should have the following characteristics:
the Robo-Sumo ring is a flat cylinder between 1 m and 1.5 m in diameter (40” - 60”, but typically 40” - 48”), with a thickness of between 1.2 cm and 2.5 cm (0.5” - 1”)
the ring can be made of MDF, plywood, particle board, or other materials and should have a relatively smooth surface with a bit of texture
the ring surface is painted flat black except for a 2-3 cm (0.75” - 1.25”) gloss white border marking the top side of the outside edge
different ring materials, surface textures, and surface reflectiveness may be encountered by robots, and the robots should be able to adapt themselves to the characteristics of the ring
The thickness of the ring is an important attribute as it prevents robots from re-entering the ring after they have been forced out. A thinner ring material can be used as long as it is rigid enough to support the weight of the two robots without warping, and as long as it is raised high enough above the surface below it to prevent the robots from re-entering the ring by simply driving back into it.
The black surface and white border of the ring are important features which allow the robots to sense the edge of the ring and prevent themselves from unintentionally losing a bout by exiting the ring.
Robo-Sumo qualification
Each sumo robot must conform to all of the rules as well as prove its operational capabilities to qualify for the first match. To qualify, a robot must demonstrate:
a 5 s delay after activation and before initiating any movement within the ring (the movement of robot components that are not part of the drive train is allowed), followed by…
remote, autonomous object sensing, in which the robot is required to find and move toward an object set up just outside of the ring, and…
the detection and avoidance of the edge of the ring by reversing or turning away from the edge instead of driving out of the ring
Once these conditions have been met, the robot is qualified for its first match.
Robo-Sumo judging
A referee is selected or appointed to oversee and judge each match of three bouts. The referee will instruct the robot handlers on robot placement for each bout, and will start the bouts with a count (e.g. 3, 2, 1, go!). At the end of the count, the robot handlers will activate their robots to start a 5s time delay, and the referee will start a two minute bout timer which will be used to end the bout in the event of a deadlock.
During the 5 s start delay, the referee will ensure that the robots do not move and that the robot handlers and any observers have moved back at least 1 m (3.5’) from the edge of the ring in order to be out of the sensor range of the robots doing battle in the ring.
After the 5 s delay, the robots must begin maneuvering in order to seek out their opponent and to try to push or force them out of the ring.
End of the bout
The bout ends when one robot loses by either 1) partially or fully leaving the ring in such a manner that it cannot, under its own power, re-enter the ring, or 2) has a mechanical failure including a loss of power, propulsion, or the loss of a component, or 3) after the bout timer has elapsed in the event that neither robot has left the ring or failed.
Sometimes, complex robots win…
…and sometimes simple is just as effective!
Declaring a winner
If one robot is still actively maneuvering in the ring after the other robot leaves the ring or has a mechanical failure, the referee will declare the active robot in the ring the winner of that bout.
If one robot succeeds in forcing the other robot out of the ring while itself remaining in the ring, the referee will declare the robot that forced its opponent out as the winner of that bout.
If one robot forces the other robot out of the ring and both robots end up entangled at the edge of the ring, the referee can declare the robot that forced its opponent out as the winner if they believe it would have likely remained in the ring after forcing its opponent out of the ring.
Three bouts are played in succession from different starting points, and the robot winning the higher number of bouts wins the match.
Declaring a draw
If both robots leave the ring without actively maneuvering to search for each other, or if both robots experience mechanical failures, the referee declares the bout a draw.
If one robot forces the other robot out of the ring, but leaves the ring in the process either under its own power and control, or leaves the ring due to becoming entangled with the robot forced out of the ring, the referee declares the bout a draw.
If both robots are deadlocked in the ring after two minutes have elapsed, the referee declares the bout a draw. If both robots are deadlocked in the ring before two minutes have elapsed, and the referee deems the deadlock unlikely to be resolved within the remaining two minute time, the referee can stop the bout and declare the bout a draw.
After a draw the referee can have the robots re-start a bout, or proceed to the next bout, at their discretion, or based on the time constraints of the competition. If all three bouts end in a draw, the referee can elect to re-start any bout and declare the first robot to win a single bout the winner of the match.
In all cases, the decision of the referee is final.